

import rhinoscriptsyntax
as
rs
import math
from System.Drawing import Color
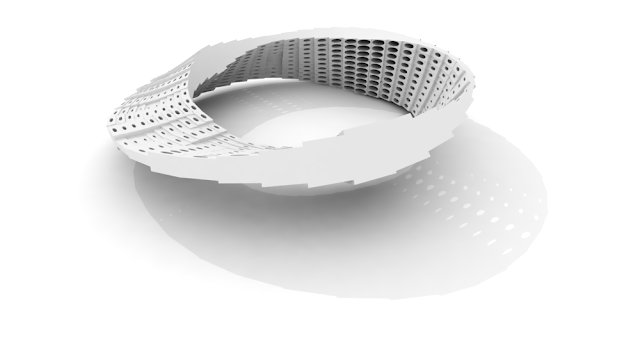
#define a mobius strip surface
xy =(10,10)
o=-0.5
p=0.5
op=1/(xy[0])
vp =2*math.pi
vpstep=vp/(xy[1])
points = []
a=2
for i in rs.frange(-0.5,0.5,op):
for j in rs.frange(0,vp,vpstep):
b=j/2
x=math.cos(j)*(a+i*math.cos(b))
y=math.sin(j)*(a+i*math.cos(b))
z=i*math.sin(b)
pt = x,y,z
points.append(pt)
xy=(xy[0]+1,xy[1]+1)
rs.AddLayer('surface',Color.Black)
srf=rs.AddSrfPtGrid(xy, points)
rs.ObjectLayer(srf,'surface')
rs.EnableRedraw(False)
#divide the srf
uDom = rs.SurfaceDomain(srf,0)
vDom = rs.SurfaceDomain(srf,1)
uDivide = 10
vDivide = 40
Ustep = (uDom[1]-uDom[0])/int(uDivide)
Vstep = (vDom[1]-vDom[0])/int(vDivide)
ptLt = []
ptNorm=[]
for i in rs.frange(uDom[0],uDom[1],Ustep):
pts = []
normLt=[]
for j in rs.frange(vDom[0],vDom[1],Vstep):
evalpt=rs.EvaluateSurface(srf,i,j)
norm=rs.SurfaceNormal(srf,(i,j))
norm=rs.VectorUnitize(norm)
norm=norm*.1
pts.append(evalpt)
normLt.append(norm)
ptNorm.append(normLt)
ptLt.append(pts)
crvLt=[]
crvcentLt=[]
rs.AddLayer('curves',Color.DarkRed)
crvsTP=[]
centTP=[]
cellNormsLt=[]
cellcrvsLt=[]
cellPtsLt=[]
for i in range(uDivide):
crvcent=[]
crvs=[]
cellpt=[]
for j in range((vDivide)):
pt1=ptLt[i][j]
ptn1=ptNorm[i][j]
pt2=ptLt[i+1][j]
ptn2=ptNorm[i+1][j]
pt3=ptLt[i][j+1]
ptn3=ptNorm[i][j+1]
pt4=ptLt[i+1][j+1]
ptn4=ptNorm[i+1][j+1]
cellPts=[pt1,pt2,pt4,pt3,pt1]
cellNorms=[ptn1,ptn2,ptn4,ptn3,ptn1]
cellNormsLt.append(cellNorms)
cellcrv=rs.AddPolyline(cellPts)
crv=rs.AddCurve(cellPts,3)
cellcrvsLt.append(cellcrv)
rs.ObjectLayer(crv,'curves')
crvs.append(crv)
crvsTP.append(crv)
cent=rs.CurveAreaCentroid(crv)
centTP.append(cent[0])
crvcent.append(cent[0])
cellPtsLt.append(cellPts)
crvcentLt.append(crvcent)
#define multiple attractor points
and define weighting of each pt on surface to closest attractor point
def closestpt(attpts,pt):
distLt=[]
count=0
for u in attpts:
count=count+1
dist=rs.Distance(u,pt)
distLt.append(dist)
mindist=min(distLt)
lenLt=len(distLt)
for j in range(0,lenLt):
if distLt[j]==mindist:
return distLt[j]
attpts=rs.GetPoints('pick pts')
lineLt=[]
dist=[]
for u in crvcentLt:
liLt=[]
for j in u:
di=closestpt(attpts,j)
liLt.append(di)
dist.append(di)
lineLt.append(liLt)
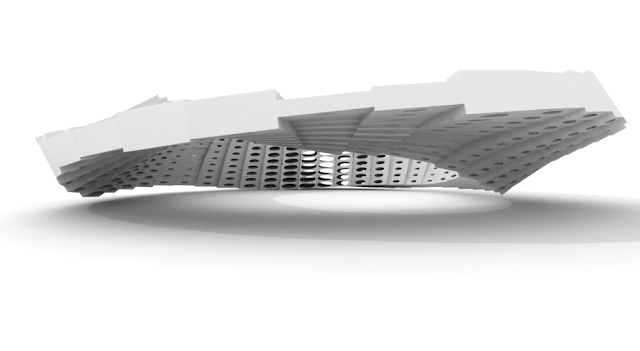
#create apertures and define
depth of surface in accordance to weighting of pt
mindist=min(dist)
maxdist=max(dist)
listLen=len(crvsTP)
mindepth=0.1
maxdepth=3
offptsLt=[]
offptsreLt=[]
offcrvLt=[]
offcrvreLt=[]
loftsqLt=[]
offcrvcentLt=[]
offcrvrecentLt=[]
offlineLt=[]
offlinereLt=[]
for i in range(listLen):
scale=(dist[i]-mindist)/(maxdist-mindist)*(maxdepth-mindepth)+mindepth
offpts=[]
offptsre=[]
listlen=len(cellNormsLt[i])
for j in range(listlen):
pt =cellNormsLt[i][j]*scale
ptvect=rs.VectorAdd(pt,cellPtsLt[i][j])
ptvectrev=rs.VectorAdd(-pt,cellPtsLt[i][j])
offpts.append(ptvect)
offptsre.append(ptvectrev)
offline=rs.AddPolyline(offpts)
offlineLt.append(offline)
offcrv=rs.AddCurve(offpts,3)
offcrvcent=rs.CurveAreaCentroid(offcrv)
offcrvcentLt.append(offcrvcent[0])
offcrvLt.append(offcrv)
offlinere=rs.AddPolyline(offptsre)
offlinereLt.append(offlinere)
offcrvre=rs.AddCurve(offptsre,3)
offcrvrecent=rs.CurveAreaCentroid(offcrvre)
offcrvreLt.append(offcrvre)
offcrvrecentLt.append(offcrvrecent[0])
offptsLt.append(offpts)
loftsq=rs.AddLoftSrf([offline,cellcrvsLt[i],offlinere])
loftsqLt.append(loftsq)
offptsreLt.append(offptsre)
#scale apertures and create
lofted surfaces
minscale=0.2
maxscale=1.0
for i in range(listLen):
scale=(dist[i]-mindist)/(maxdist-mindist)*(maxscale-minscale)+minscale
mid=rs.ScaleObject(crvsTP[i],centTP[i],(scale,scale,scale),False)
top=rs.ScaleObject(offcrvLt[i],offcrvcentLt[i],(scale,scale,scale),False)
bot=rs.ScaleObject(offcrvreLt[i],offcrvrecentLt[i],(scale,scale,scale),False)
par=rs.CurveClosestPoint(top,offptsLt[i][0])
parre=rs.CurveClosestPoint(bot,offptsreLt[i][0])
parmid=rs.CurveClosestPoint(mid,offptsreLt[i][0])
#adjust seam to loft smoothly
rs.CurveSeam(bot,parre)
rs.CurveSeam(top,par)
rs.CurveSeam(mid,parmid)
rs.AddLoftSrf([offlinereLt[i],bot])
rs.AddLoftSrf([offlineLt[i],top])
lofttube=rs.AddLoftSrf([bot,mid,top])
rs.LayerVisible('surface',False)
rs.EnableRedraw(True)

multiple attractor points set points of shallow component depth and aperture size

Wow you are wanderfull and usefull post .Good ang High quality in Low cost sheet metal solutions provider in Delhi,Faridabad,Noida and Gurgaon for sheet metal services.
ReplyDeletesheet metal manufacturers Faridabad
Good news
ReplyDeleteBest Fabrication Companies in Bangalore